Download the IDE Arduino software
- Install the Arduino software
- Install the U8glib library :
- Go to Sketch > Include library> Manage libraries and search “U8glib” and install them
- Close Arduino software
Download the Marlin firmware for R-CNC and unzip them
- Open Arduino IDE
- File >Open and looking for Marlin_R-CNC_EN> Marlin_RC7_R-CNC > Marlin_RC7_R-CNC.ino
- Plug the Ramps 1.4 into a USB port on your computer, either it recognizes the card and installs the driver, or you’ll have to look for the driver corresponding to your card, indeed, the chip making the gateway between USB and serial communication varies From one manufacturer card to another, you have to find the right driver.
- Once the driver is installed, in the Arduino software, go to Tools> Boards, and select “Mega 2560”
- Then Tools> Port, and select the port of your card.
- Upload the firmware by clicking on
 . This may take a little time.
. This may take a little time.
Note: The firmware is provided for a certain configuration: 1.8 ° motors set in 1 / 16th step, 20×60 teeth pulleys for Y, threaded rods 1,25mm pitch. If your configuration differs, you’ll need to change the values at the “#define DEFAULT_AXIS_STEPS_PER_UNIT” line on the Configuration.h tab. To help you, you can use this calculation tool.
If you decide to use another firmware, I advise you to note the accelerations and max speeds for each axis that I parameterized in the Marlin for the R-CNC
Now the LCD displays information!
Now we will download the Repetier Host software, just to test the movements of our cnc
- Install Repetier Host
- In Repetier, go to Configuration> Printer Setup, select the correct COM port and then “Apply”.
- Click on the “Connect” icon on the left, it must become green.
We will now move the axes of our CNC! To do this, “Manual control” tab. But above all, manually position each axis in the middle of the travel.
- You have 3 sets of buttons, the left control X and Y, the middle Z, and the right one the extruder.(But we do not need the latter in our case!)
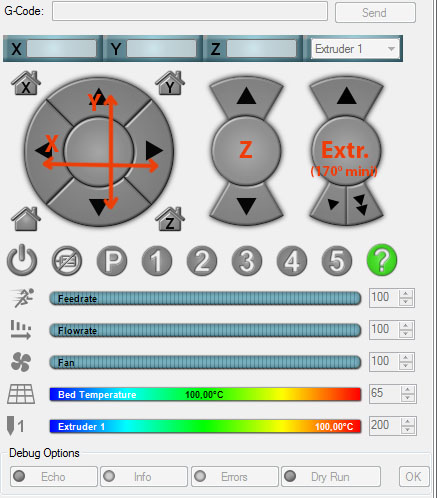
- When you click down on the left button set, the portal (Y) must move frontward from the value in mm you have clicked and vice versa.
- When you click to the right, the extruder (X) must go to the right of the value in mm that you clicked.
- Same with Z on the middle button set
Note: If one of the motors does not rotate in the correct direction, simply turn its plug 180 ° on the Ramps 1.4 (for the nema 17) or by inverting the two pairs of wires of the nema 23 motors on the TB6600.
Note2: If one of the X or Z motors loses steps in a grunting noise, you must lubricate the threaded rods with PTFE dry lubricant and securely adjust the pololus. (Small potentiometers on the steppers drivers on the Ramps)
We go to use the CNC
bonjours l’arduino 1.0.6 n’est pas dispo sur votre lien. le quelle prendre alors ?
Bonjour !
Si si , la 1.0.6 est bien dispo, il suffit d’aller dans la section “PREVIOUS RELEASES” dans le rectangle en bas à droite 😉
Bonjour,
J’ai un soucis a la compilation :
Arduino: 1.0.6 (Windows 7), Board: “Arduino Mega 2560 or Mega ADK”
In file included from /MarlinConfig.h:39,
from /Marlin.h:36,
from blinkm.cpp:28:
/SanityCheck.h:34:4: error: #error “Versions of Arduino IDE prior to 1.6.0 are no longer supported, please update your toolkit.”
Bonjour, J’ai mis un nouveau firmware qui fonctionne avec la dernière version d’Arduino
How to perform a home without endstops? Is it possible enable endstops to x and y axes um the firmware?
Hello, it is useless to have endstops because the home is different to each piece we want to machine. Manually set the machine to home, and start the program.
Ce serait bien (mais un du boulot et on n’a pas toujours envie, je comprends) que tu fasses un résumé des paramètres spécifiques à la R-CNC pour qu’on puisse installer n’importe quel firmware (une version plus récente de Marlin ou autre chose) facilement 🙂
Bonjour, oui c’est du boulot ! La solution la plus simple est d’ouvrir le firmware sous arduino, onglet Configuration.h et de regarder les infos dont on a besoin 😉
Hello, i just got my arduino kit and I installed all the software, my problem is that the lcd button keeps pressing it self. When i turn the arduino on every second the speaker makes a beep sound and the lcd moves through the menu. DO you have any idea whats causing that problem? My lcd came with 1 scratched up copper line at the back, do you think this may cause it?
bonjour,
c’est super, mais quel format faut il envoyer dans l’Arduino pour pouvoir graver exemple : circuit imprimer ?
Merci d’avance
Bonjour,
Merci de lire la page suivante “utilisation R-CNC” qui détaille les exemples de suites logicielles à utiliser. Les fichiers à mettre sur la carte SD doivent être au format Gcode.
Romain
Bonjour
j ai un petit prob car a chaque fin d’usinage repetier me donne un message “probleme temperature” et en resetant je perd mon origine.
quelle ligne dans marlin dois je modifier
merci a vous
Bonjour, normalement il n’y a rien à modifier, ce soucis doit venir d’ailleurs, il serait utile d’ouvrir une discussion sur le forum.
Romain
Bonjour Romain,
Voilà plus d’un an que j’utilise cette superbe cnc sans arrêt. Dernièrement je me suis procuré une broche 1.5kW et le variateur de fréquence qui va avec. Je cherchais à savoir s’il est possible avec le marlin actuel de piloter la vitesse de la broche via une sortie pwm par exemple ?
Merci d’avance
Bonjour, je ne l’ai jamais fait mais à priori c’est possible, ce sera plus simple avec Repetier Firmware car il comprends une fonction CNC. Pour plus de détails il faudrait ouvrir un sujet sur le forum.
Romain
Can marlin 3DP be used by CNC?
When I change the work area, must I also change marlin on Arduino IDE?
I’m sorry I don’t understand. because I’m still a beginner. thank you
Hi !
We are now on the RS-CNC, the R-CNC is a old version, please check the new version.
Arduino : 1.8.6 (Windows Store 1.8.14.0) (Windows 10), Carte : “Arduino/Genuino Mega or Mega 2560, ATmega2560 (Mega 2560)”
Marlin_RC7_R-CNC:51:110: error: U8glib.h: No such file or directory
compilation terminated.
exit status 1
U8glib.h: No such file or directory
Ce rapport pourrait être plus détaillé avec
l’option “Afficher les résultats détaillés de la compilation”
activée dans Fichier -> Préférences.
Bonjour, il faut installer la librairie U8glib dans arduino pour que cela fonctionne
Romain
I want to use the RCNC for creating half tone pictures. The software halftoner converts the image to an gcode but repetier host do not work with that. Anyone knows an alternative that will work with the RCNC and halftoner-software ?
Hi Dan, For software question, you should post on the forum 😉
Romain
Bonjour, la CNC est fini et la je test les Axe pour voir si il y un es problème :
Nema 17: bouge 1 mn à gauche puit 1min a droite et s’arrête. ( peu être mauvais câblage )
Nema 23 (axe X) pareille bloque tu n’aurait pas une petite idée ??
Merci pour tout ce que tu fait prochaine Etape Imprimante 3D I3 RS ^^
Salut Yass
Ça ressemble beaucoup à un mauvais câblage des moteurs pas à pas sur le driver, comme indiqué dans le tuto, les couleurs des 4 fils du moteur pas à pas ne sont pas normalisées et varient en fonction du constructeur. (et même parfois la doc fournie avec le moteur n’est pas bonne !)
Premièrement il faut repérer les deux paires de câbles pour chaque bobine:
– soit en utilisant un multimètre en vérifiant la continuité entre les cables, quand ça bippe entre deux fils, c’est que tu as une paire qui fait partie de la même bobine.
– soit en mettant au hasard deux fils du moteur en contact, si les 2 fils en contact rendent le moteur quasi impossible à tourner à la main, c’est que la paire va ensemble.
Quand tu as repéré tes deux paires, tu mets une paire sur A+ A- et l’autre sur B+ B- sur le TB6600.
Voilà voilà
Pour d’autres questions merci d’utiliser le forum !
Romain
Bonsoir je suis actuellement en fin de construction de ma cnc mais problème le moteur de l’axe Z à vraiment du mal à fonctionner… même que je lui fait faire un retour à l’origine sans le relier à sa courroie et à sa tige filletté, il ne tourne 1 petite seconde et puis plus rien… j’ai lu un commentaire et tester les fils A+ A- B+ B- comme c’était marqué et rien n’y fais… je me demande alors si ce n’ai pas le moteur qui est HS car même une fois le moteur hors tension je le trouves terriblement dur à tourner même à la main…
Bonjour Louis,
Cette question a plutôt sa place sur le forum.
Ce n’est pas normal que le moteur soit difficile à tourner une fois hors tension.
Il faut chercher les points durs mécaniques et les régler.
Si pas de points durs mécaniques, il faut se pencher une nouvelle fois sur le câblage du moteur qui ne doit pas être bon.
Sinon possible que ce soit le moteur qui soit HS mais c’est plutôt rare !
Bonne journée
Romain
Avec la R-CNC configuré Marlin v 1.1
Quel post processeur utilisé qui est compatible avec fusion 360
Bonsoir a tous.
Voici une petite vidéo du problème que je rencontre pour faire fonctionner ma cnc via mon pc
Merci beaucoup pour votre aide.
https://youtu.be/XCQ3waJwdFE
Je galère qui peut m’aider merci
Bonsoir Michael,
ça fait plus de 2 ans qu’on est passé sur la RS-CNC32 qui a une électronique bien plus adaptée ^^
Pour répondre à ta question, il semble y avoir un soucis de communication entre le PC et la machine, je pense que ce doit être la vitesse de communication renseignée dans Repatier host qui n’est pas la bonne.
Vas dans dans Configuration > Réglage imprimante et dans “vitesse” s’il y a 115200 remplace le par 250000 ou inversement, c’est tellement vieux que je ne me souviens plus la vitesse de com de la machine. ^^
Sinon pour info les questions techniques doivent être postées sur le forum pour profiter à d’autres.
Bonne soirée
Romain