For those who want to mount the machine directly with the update, do not print these parts of the original pack:
- X-side, X-nut, Xmoto-nema23, 1 Handweel, X-fixation A and B, X-blocker.
Printables parts:
Download pack on Thingiverse
| Nom | Quantité | Infill | Commentaire |
|---|---|---|---|
| X-left_belt | 1 | 40-50% | |
| X-right_belt | 1 | 40-50% | |
| Xbelt | 1 | 40-50% | |
| XbeltMotor | 1 | 40-50% | |
| Tens-A | 1 | 40-50% | |
| Tens-B | 1 | 40-50% |
Non printables parts:
| Name | Quantity | Comment | Link |
|---|---|---|---|
| 20 teeth pulley 6.35mm | 1 | Choose type C | Banggood |
| 20 teeth pulley 8mm | 1 | Choose Type B | Banggood |
| 60 teeth pulley 8mm | 1 | Banggood | |
| GT2 closed belt 232 | 1 | Aliexpress | |
| GT2 belt 10mm | 2m | Aliexpress | |
| Many M5 screws and nuts | Choose Set A cap head | Aliexpress | |
| 625 bearings | 2 | Banggood | |
| 608 bearings | 2 | Banggood | |
| Smooth rod 8mm | 100mm |
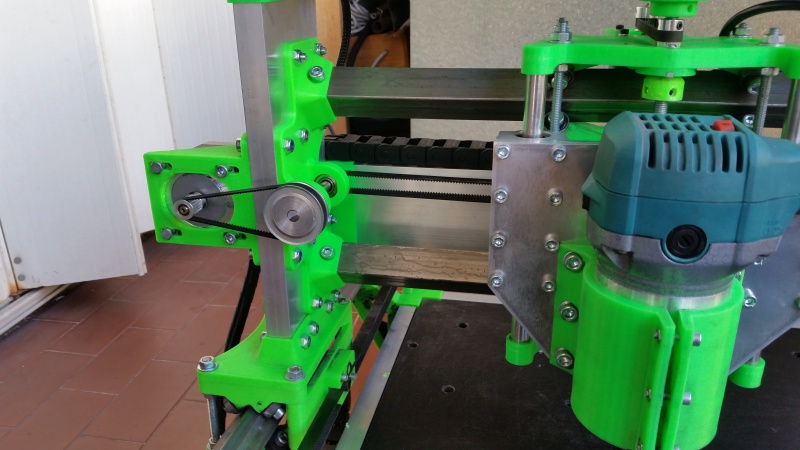
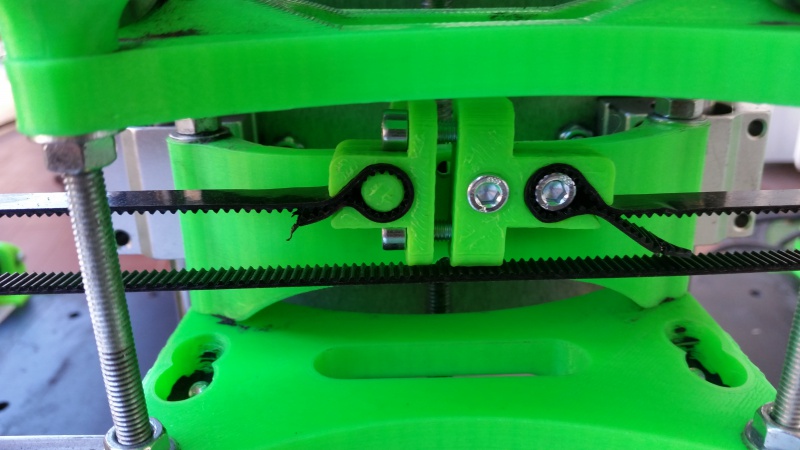
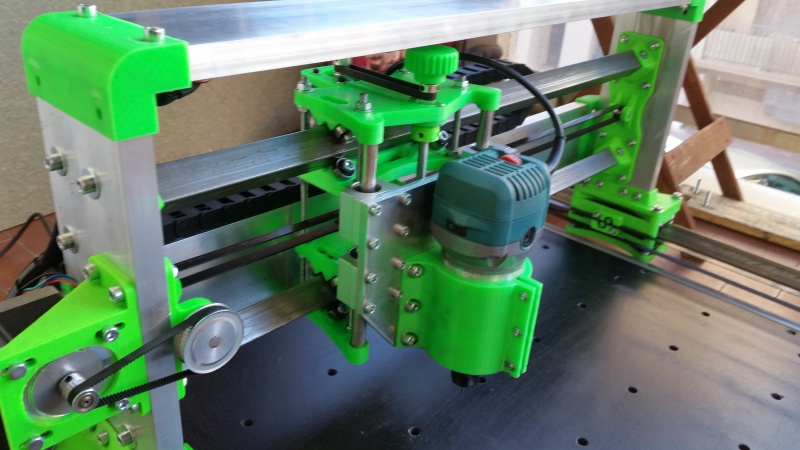
Assembly:

Arduino modifications:
Go to the “Configuration.h” tab and look for these lines:
#define DEFAULT_AXIS_STEPS_PER_UNIT {2560,240,2560,200} //
#define DEFAULT_MAX_FEEDRATE {15, 180, 6, 25} // (mm/sec)
#define DEFAULT_MAX_ACCELERATION {50,50,20,10000} // X, Y, Z, E
Then set the X values like Y:
#define DEFAULT_AXIS_STEPS_PER_UNIT {240,240,2560,200} //
#define DEFAULT_MAX_FEEDRATE {180, 180, 6, 25} // (mm/sec)
#define DEFAULT_MAX_ACCELERATION {50,50,20,10000} // X, Y, Z, E
We upload to the Arduino, we test under Repetier that X goes in the right direction, if not, go back to the “Configuration.h” tab and look for this line:
#define INVERT_X_DIR true
If set to “true”, set “false”, or vice versa.
We upload and it’s ready!
If you encounter difficulties, do not hesitate to go on the forum