Pour ceux qui veulent directement monter la machine avec la mise à jour , ne pas imprimer ces pièces du pack original:
- X-side, X-nut, Xmoto-nema23, 1 Handweel, X-fixation A et B, X-blocker.
Pièces à imprimer:
Télécharger le pack sur Thingiverse
| Nom | Quantité | Infill | Commentaire |
|---|---|---|---|
| X-left_belt | 1 | 40-50% | |
| X-right_belt | 1 | 40-50% | |
| Xbelt | 1 | 40-50% | |
| XbeltMotor | 1 | 40-50% | |
| Tens-A | 1 | 40-50% | |
| Tens-B | 1 | 40-50% |
Pièces non imprimables:
| Nom | Quantité | Commentaire | Lien |
|---|---|---|---|
| poulie 20 dents axe 6.35mm | 1 | Choisir type C | Banggood |
| poulie 20 dents axe 8mm | 1 | Choisir Type B | Banggood |
| poulie 60 dents axe 8mm | 1 | Banggood | |
| courroie fermée GT2 taille 232 | 1 | Aliexpress | |
| courroie GT2 10mm | 2m | Aliexpress | |
| diverses vis M5 avec écrous | Choisir "Set A cap head" | Aliexpress | |
| Roulements 625 | 2 | Banggood | |
| Roulements 608 | 2 | Banggood | |
| Tige lisse 8mm | 100mm |
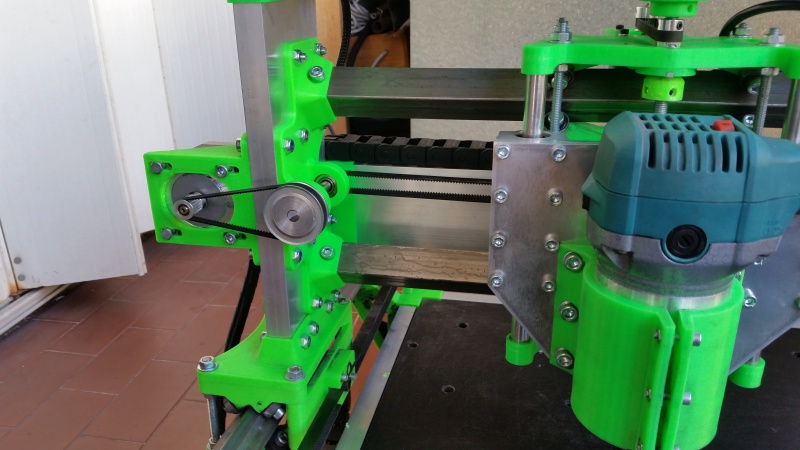
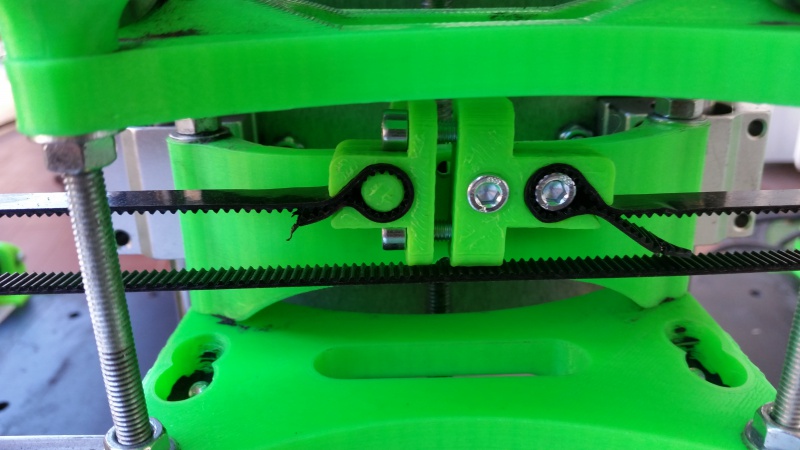
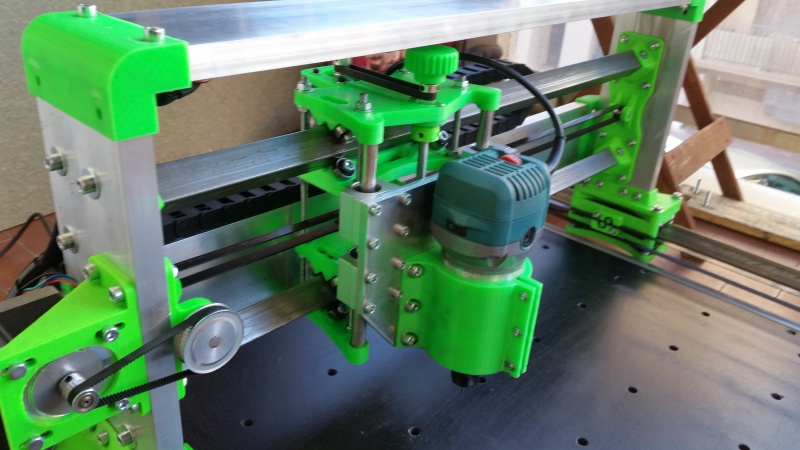
Montage:

Modification Arduino
Avant de téléverser les modifications suivantes sur votre arduino, il est grandement préférable de lancer un « Eeprom Clear » trouvable dans les exemples arduino si vous passez de la version tige filetée à la version courroie.
Aller à l’onglet « Configuration.h » puis cherchez ces lignes :
#define DEFAULT_AXIS_STEPS_PER_UNIT {2560,240,2560,200} //
#define DEFAULT_MAX_FEEDRATE {15, 180, 6, 25} // (mm/sec)
#define DEFAULT_MAX_ACCELERATION {50,50,20,10000} // X, Y, Z, E
Puis mettre les valeurs X identiques à Y:
#define DEFAULT_AXIS_STEPS_PER_UNIT {240,240,2560,200} //
#define DEFAULT_MAX_FEEDRATE {180, 180, 6, 25} // (mm/sec)
#define DEFAULT_MAX_ACCELERATION {50,50,20,10000} // X, Y, Z, E
On téléverse sur la carte, on teste sous Repetier que X va dans le bon sens, si ce n’est pas le cas, retournez dans l’onglet « Configuration.h » et cherchez cette ligne:
#define INVERT_X_DIR true
Si la valeur est sur « true », mettre « false », ou inversement.
On téléverse et c’est prêt !
Si vous rencontrez des difficultés, n’hésitez pas à aller sur le forum