
Il n'est pas normal que le moteur ne bouge pas un tout petit peu quand STEP- (ou PUL-) est mis en contact avec Gnd et remis en l'air.
A noter qu'il ne faut pas garder le contact avec Gnd car c'est le changement qui simule l'impulsion.
As tu la référence des drivers que tu utilises.
Eventuellement fais une photo.
Peut-être qu'ils n'ont pas d'opto coupleur en entrée auquel cas il faut changer le câblage.
Ont-ils bien des pins ENA+ , DIR+ et PUL+?
Re: evo RS-CNC vers RS-CNC32 moteurs immobiles [RESOLU]
Re: evo RS-CNC vers RS-CNC32 moteurs immobiles
Bonjour
J'ai fait des tests sur les moteurs via un arduino.
https://wiki.dfrobot.com/TB6600_Stepper ... U__DRI0043
Les moteurs font cette fois un bruit normal par contre ils ne bougent toujours pas. Comme s'ils manquaient de puissance.
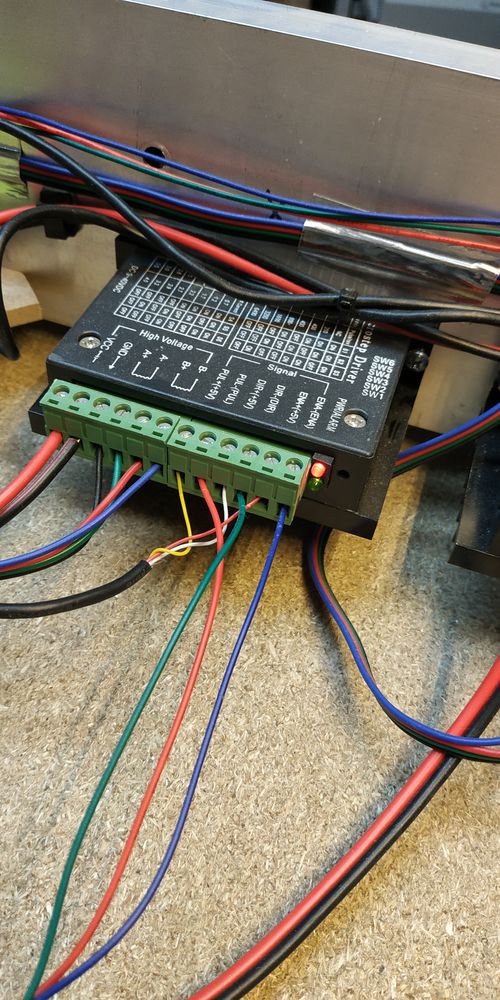
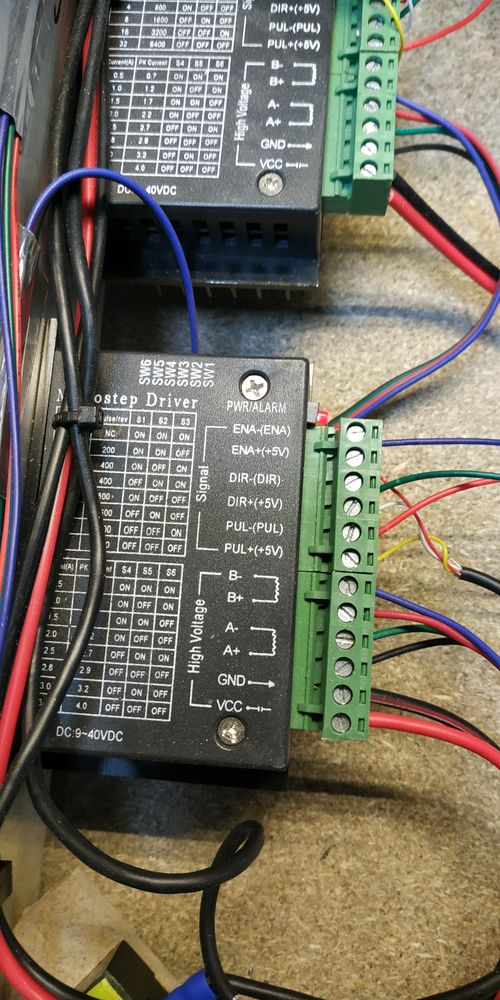
Voici les photos des drivers
Sinon en rebranchant le tout j'ai cramé mon ecran . J'en ai commandé un nouveau je ne sais pas quand est ce qu'il arrivera.
. J'en ai commandé un nouveau je ne sais pas quand est ce qu'il arrivera.
Voila pour les nouvelles
J'ai fait des tests sur les moteurs via un arduino.
https://wiki.dfrobot.com/TB6600_Stepper ... U__DRI0043
Les moteurs font cette fois un bruit normal par contre ils ne bougent toujours pas. Comme s'ils manquaient de puissance.
Voici les photos des drivers


Sinon en rebranchant le tout j'ai cramé mon ecran
Voila pour les nouvelles
Re: evo RS-CNC vers RS-CNC32 moteurs immobiles
Désolé pour ton écran.
Si le moteur ne tourne pas quand tu fais le test de le commander en manuel ( comme je l'ai dans le message précédent), il y a 9 chances sur 10 que le moteur ne soit pas bien connecté.
Vérifies le câblage entre le driver et le moteur. Il ne faut pas se fier à la couleur des fils. Il faut identifier les 2 fils qui forment une paire (e.g. A+ A-). Cela est expliqué dans le tuto et à plusieurs endroits sur le forum.
Ce test peut être fait alors que l'ESP32/TFT ne sont pas raccordés.
Si le moteur ne tourne pas quand tu fais le test de le commander en manuel ( comme je l'ai dans le message précédent), il y a 9 chances sur 10 que le moteur ne soit pas bien connecté.
Vérifies le câblage entre le driver et le moteur. Il ne faut pas se fier à la couleur des fils. Il faut identifier les 2 fils qui forment une paire (e.g. A+ A-). Cela est expliqué dans le tuto et à plusieurs endroits sur le forum.
Ce test peut être fait alors que l'ESP32/TFT ne sont pas raccordés.
Re: evo RS-CNC vers RS-CNC32 moteurs immobiles
J'avais déjà vérité les paires des bobinages des moteurs. Je vais refaire une vérification car les 3 font pareils du coup j'ai peut être fait une bêtise ou j'ai mal interprété un trucs .
La suite au prochain épisode
La suite au prochain épisode
Re: evo RS-CNC vers RS-CNC32 moteurs immobiles
Sur la photo, tu as 3 fils séparés qui arrivent sur ENA+, DIR+ et STEP+. En fait un seul fil venant de +5V et reliant les 3 bornes est suffisant.
Ta photo ne permet pas de voir si ces bornes sont bien reliées au +5V mais je présume que tu as déjà vérifié cela.
Ce montage est spécifique à la version 32bits
Ta photo ne permet pas de voir si ces bornes sont bien reliées au +5V mais je présume que tu as déjà vérifié cela.
Ce montage est spécifique à la version 32bits
-
RoMaker

- Administrateur du site
- Messages : 5067
- Enregistré le : 02 janv. 2017 20:24
- Localisation : Montpellier
- Contact :
Re: evo RS-CNC vers RS-CNC32 moteurs immobiles
Yes, j'allais dire la même chose que Mstrens, tous les DIR+, ENA+, PUL+ des 3 drivers doivent être reliés ensemble et alimentés en 5v permanent.
Re: evo RS-CNC vers RS-CNC32 moteurs immobiles
J'ai revérifié le câblage des phases des moteurs à partir de ce document
http://french.jkong-motor.com/sale-1101 ... -8n-m.html
Apparemment je suis bon de ce coté là. Sauf si j'ai mal compris le schéma. J'ai cablé dans cet ordre AC et BD.
Ensuite je vous ai fait un schéma rapide à la main pour vous montrer mon montage (c'est moche mais ça fait le job)
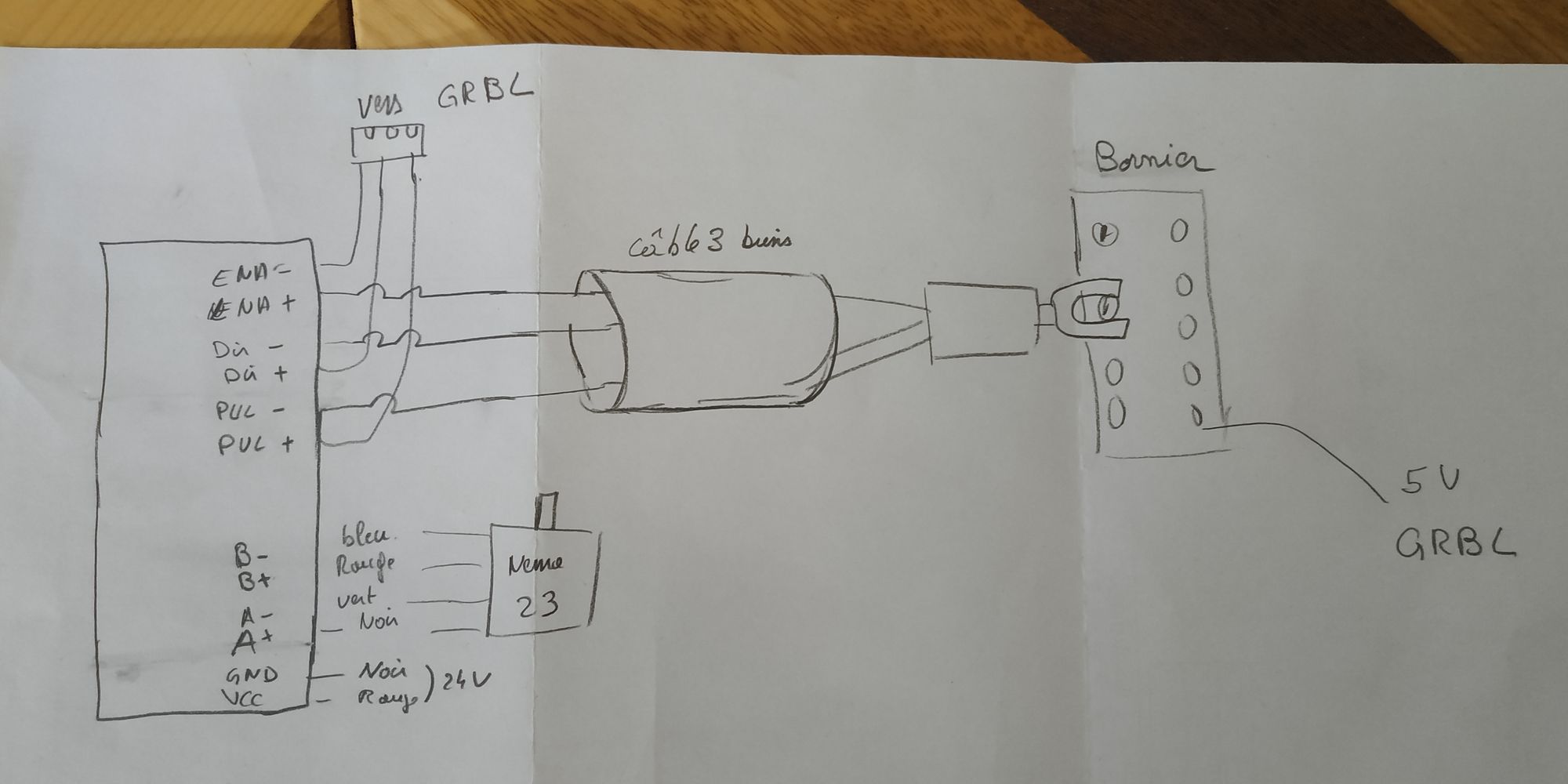
Le seul point faible de mon montage pourrait être un mauvais sertissage au niveau de ma cosse. Je viens de me faire la remarque en relisant mon schéma. Je vais tester ça tout à l'heure
http://french.jkong-motor.com/sale-1101 ... -8n-m.html
Apparemment je suis bon de ce coté là. Sauf si j'ai mal compris le schéma. J'ai cablé dans cet ordre AC et BD.
Ensuite je vous ai fait un schéma rapide à la main pour vous montrer mon montage (c'est moche mais ça fait le job)

Le seul point faible de mon montage pourrait être un mauvais sertissage au niveau de ma cosse. Je viens de me faire la remarque en relisant mon schéma. Je vais tester ça tout à l'heure
Re: evo RS-CNC vers RS-CNC32 moteurs immobiles
Le schéma montre des erreurs:
Ce sont ENA- , DIR- et PUL- qui doivent aller vers GRBL
Tous les + (ENA+, DIR,PUL+) doivent tous les 3 aller à +5V
Ce sont ENA- , DIR- et PUL- qui doivent aller vers GRBL
Tous les + (ENA+, DIR,PUL+) doivent tous les 3 aller à +5V
Re: evo RS-CNC vers RS-CNC32 moteurs immobiles
Je suis vraiment un gros boulet ! j'ai réussi à faire un schéma faux. Donc en vérité c'est correctement câblé. J'ai vérifié tous mes contacts et ils sont bons.
Sincèrement désolé pour le schéma
Re: evo RS-CNC vers RS-CNC32 moteurs immobiles
OK. Alors le câblage est correct (en supposant que les paires des steppers sont bonnes - les couleurs ne sont fiables).
Comme signalé, fais un test en ne connectant rien à GRBL.
Raccordes ENA+, DIR+, PUL+ à +5V
Ne raccordes pas DIR-, ENA-
Raccordes PUL- à un fil dont l'autre extrémité est mis en contact par intermitence avec le - 24V (= Gnd)
A chaque contact/interruption avec Gnd, le moteur doit tourner un tout petit peu.
Comme signalé, fais un test en ne connectant rien à GRBL.
Raccordes ENA+, DIR+, PUL+ à +5V
Ne raccordes pas DIR-, ENA-
Raccordes PUL- à un fil dont l'autre extrémité est mis en contact par intermitence avec le - 24V (= Gnd)
A chaque contact/interruption avec Gnd, le moteur doit tourner un tout petit peu.